Setups imported with GPS coordinates embedded in the raw data have the option to be imported with the relative GPS position and the GPS projection that converts the point cloud coordinate data from scanner coordinates to GPS coordinates in either UTM (worldwide) or State plane (USA only). Each Bundle or individual Setup imported will come into the Review & Optimize area with a UCS that represents the GPS projection selected.
The following scanners support GPS data:
-
RTC360 - Compass and GPS location
-
BLK2FLY - GPS location without compass information
To make use of the GPS information, select the Select Coordinate System import option.
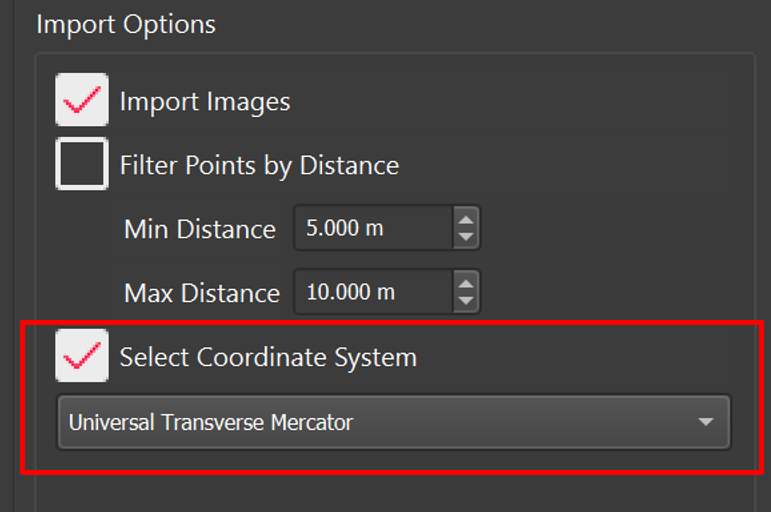
If selected, Cyclone REGISTER 360 PLUS will detect the GPS location and offer either UTM or State plane (USA only) for GPS projections.
Upon import, each bundle and orphan Setup will receive the GPS projection in the form of an attached UCS. Each bundle will be imported with one UCS attached to the Setup with the strongest GPS signal. Each orphan Setup (not attached in a bundle) will be imported with a UCS.
The Map feature can be used with the GPS projection tool to incorporate a background image during import. To use the Map feature, please refer to Geolocation of RTC360 Setups.
Note: RTC360 has a GPS receiver that does not give better than +- 10m of accuracy. So, the positions of Setups may be off when compared to the map view. In some situations, the GPS signal may be very weak showing more than 10m of error.
The GPS projection does not affect the relative positions of the Setups within the Bundle, but only changes the coordinate system of the point cloud data.
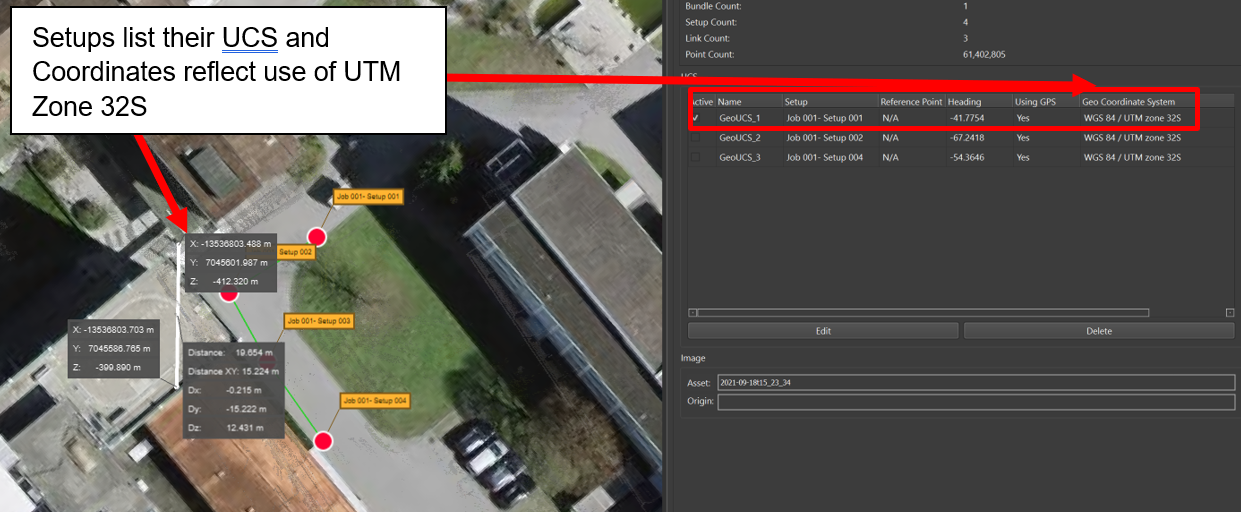
Once imported, the Setups and/or Bundles will have an associated UCS, listing if GPS was used and which projection (i.e. UTM Zone 32S).