The settings can be modified in real-time as they only apply to the Cloud-to-Cloud algorithm, and the visual density or quality, such as the density of cloud pairs in Visual Alignment, will not be impacted.
On this tab, the user can set the following values for the Cloud-to-Cloud operation.
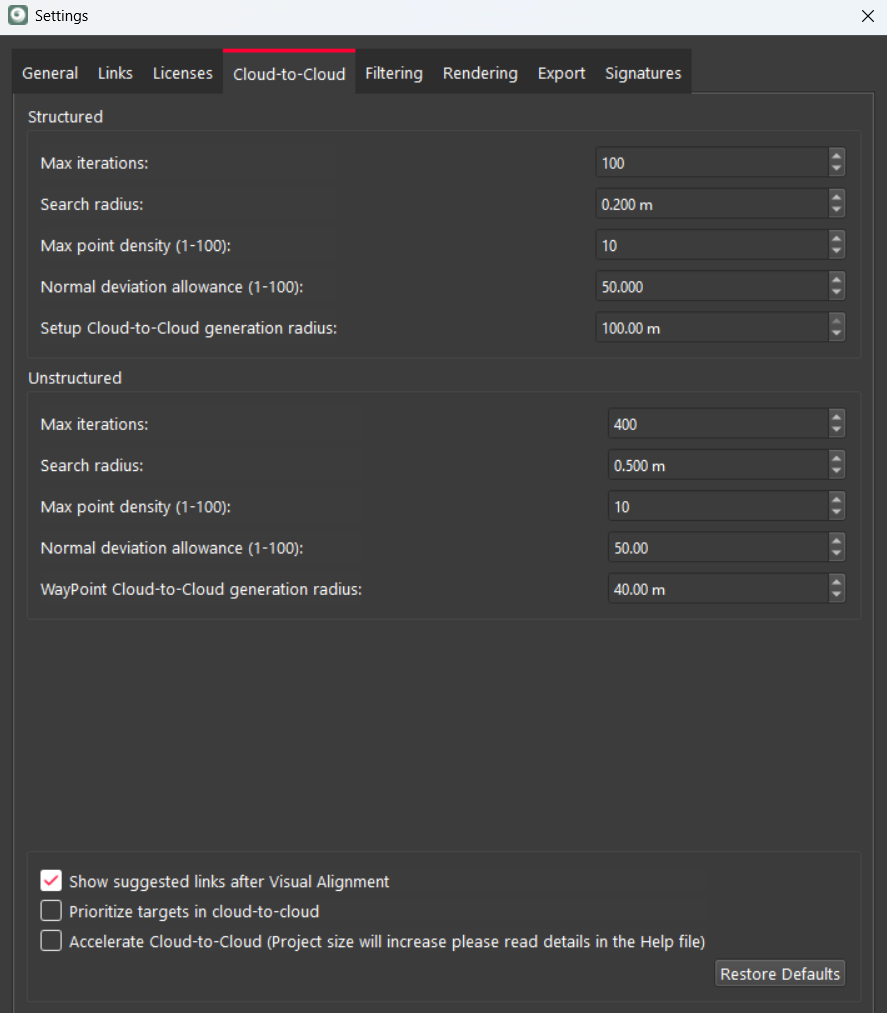
Structured Cloud-to-Cloud Settings
-
Max iterations: The maximum number of iterations the algorithm will perform to improve the alignment of the point clouds. The default for structured data is 100 and the upper limit is 10,000.
-
Search radius: The radius that software searches for corresponding points between the clouds. The default for structured data is 0.2 m and the upper limit is 5.0 m.
-
Max point density: The maximum point density considered during alignment, with a default of 10 for structured data. The settings can be modified in real time, affecting only the cloud-to-cloud algorithm and not visual density.
-
Normal deviation allowance: Scale to filter points based on the angle between their normals. The default value is 50, with a range of 1-100. A value of 1.00 indicates more aggressive filtering, excluding more surfaces with irregular faces, such as vegetation, and those with a sharper angle to the scanner. This noise data is of less value to a Cloud-to-Cloud alignment. A value of 100 indicates less aggressive filtering, allowing more deviation. Using a lower value will result in fewer points being used but also reduce error, making the alignment more accurate.
-
Setup Cloud-to-Cloud generation radius: This parameter sets the radius for Cloud-to-Cloud registration of Setups, either during import or afterward. It links multiple point clouds using Setup data by finding corresponding points to establish spatial relationships. Specifying this radius controls the size or extent of the Cloud-to-Cloud link. For example, if two separate scans of an object or scene need to be aligned using specific WayPoints, the Cloud-to-Cloud generation radius can be set to determine how large the Cloud-to-Cloud cloud is when generating a link.
Unstructured Cloud-to-Cloud Settings
-
Max iterations: Similar to the structured setting, but typically set higher due to the complexity of unstructured data. The default value is 400.
-
Search radius: The radius for searching corresponding points in unstructured clouds. The default is 0.5 m.
-
Max point density: Same as the structured setting. The default is 10.
-
Normal deviation allowance: Same as the structured setting. The default is 50, with a range of 1-100.
-
WayPoint Cloud-to-Cloud generation radius: Typically smaller than the structured setting. The default is 40 m.
Additional Options
Show Suggested Links After Visual Alignment
If enabled, Cyclone REGISTER 360 PLUS will search for other links upon completing a Visual Alignment. To save time, some users may prefer to disable this feature. If unchecked, Cyclone REGISTER 360 PLUS will no longer search for additional links after Visual Alignment.
Prioritize Targets in Cloud-to-Cloud
Upon link creation, Cyclone REGISTER 360 PLUS will assign a much higher weight to targets (similar to Cyclone CORE) when a Cloud-to-Cloud constraint is present. This setting only applies during link creation and can be beneficial in poor Cloud-to-Cloud conditions, such as in an open field.
Accelerate Cloud-to-Cloud
This setting enables Cloud-to-Cloud acceleration by generating pre-Cloud-to-Cloud optimisation files for point clouds. These files are saved within the project and reused during subsequent Cloud-to-Cloud operations, reducing processing time and improving overall Cloud-to-Cloud performance.
When this option is enabled, additional optimisation files are created and maintained for each point cloud. As a result, the project size on disk will increase by ~10-15%.
Benefits of using Cloud-to-Cloud acceleration:
-
Faster Cloud-to-Cloud optimisation.
-
Improved performance for multi-threaded Cloud-to-Cloud processing.
-
Reuse of previously generated optimisation files data across Cloud-to-Cloud operations.
Notes:
-
With the option enabled, optimisation files are generated during Cloud-to-Cloud if no optimisation file already exists.
-
If Cloud-to-Cloud settings affecting KD Tree generation are changed, existing optimisation files may no longer be valid and will be regenerated automatically.
-
Regeneration of optimisation files may increase processing time during the next Cloud-to-Cloud operation.
-
This feature improves processing speed only and does not affect Cloud-to-Cloud registration accuracy or results.