카테고리
프로젝트에는 "카테고리"라는 메타데이터 기능이 포함되어 있습니다. 카테고리는 프로젝트 수준에 존재하며, 지오태그에 적용할 수 있습니다(앞으로 추가 프로젝트 요소에도 카테고리를 적용할 수 있습니다).
카테고리는 HxDR에서 데이터를 완전히 맥락화하여 데이터를 극대화하는 데 도움을 주며, 요소(지오태그)를 단순한 시각적 주석에서 기능적이고 실행 가능한 데이터로 전환시켜 진정한 디지털 트윈 경험을 제공합니다.
카테고리:
단일 데이터셋의 여러 이해관계자가 여러 용도로 활용할 수 있도록 지원합니다, 예를 들어:
프로젝트 또는 자산 수명주기의 같은 단계 동안 서로 다른 이해관계자들, 예를 들면:
건설 중에는 각 하도급업체별로 동시에 고유한 카테고리(예: 상태 목록이나 조치 목록)가 정의되어 있고, 프로젝트 관리자, 현장 건강 및 안전 관리자 등에 대한 분류도 있습니다.
점유/운영 중에는 동시에 고유한 카테고리의 설계팀(예: 개조 및 공간 계획용 평면도 작성), 운영팀(예: 유지보수 추적), 안전 팀(예: 안전 위험, 안전 장비 추적), 제3자 공급업체(예: 자판기나 프린터 같은 사무 장비 공급 서비스, 외부 자산/시설 관리 시스템과의 통합 서비스) 등이 있습니다. 그리고 그 외에도 많은 것을 보입니다.
프로젝트나 자산의 전체 수명 주기 전반에 걸친 다양한 이해관계자들위의 모든 예시가 소유주-운영자의 모든 필요에 대해 행동, 결정, 자본 자산 등 방어 가능한 기록으로 데이터 내에 존재합니다.
4D 워크플로우 활성화
예를 들어, 데이터를 GeoTag 링크와 교차 연결하고, 카테고리를 사용해 다양한 작업 시대를 추적하는 방법
데이터의 견고성과 가치를 향상시키기
이해관계자들을 위한 이용 가능한 정보를 제한하지 마세요
연동된 자산/시설 관리 시스템과의 용어 정렬 기능
일관성과 검색 가능성을 보장하기 위해 카테고리 값에 대한 사전 정의된 목록을 통해 인적 오류를 줄입니다.
기술 세부사항
각 프로젝트는 무제한 카테고리를 가질 수 있습니다. 카테고리는 다음에 생성, 편집 또는 삭제됩니다 카테고리 매니저이 문서는 프로젝트의 "카테고리" 페이지에서 확인할 수 있습니다:
카테고리는 표시 순서를 포함해 사용자 지정 가능합니다. 나열된 상위 3개 카테고리(그리고 '모든 지오태그에 기본값' 라인 위에 표시됨)는 새 지오태그를 생성할 때 항상 기본적으로 표시되는 3가지 카테고리로, 가장 흔한 카테고리를 효율적으로 선택할 수 있습니다.
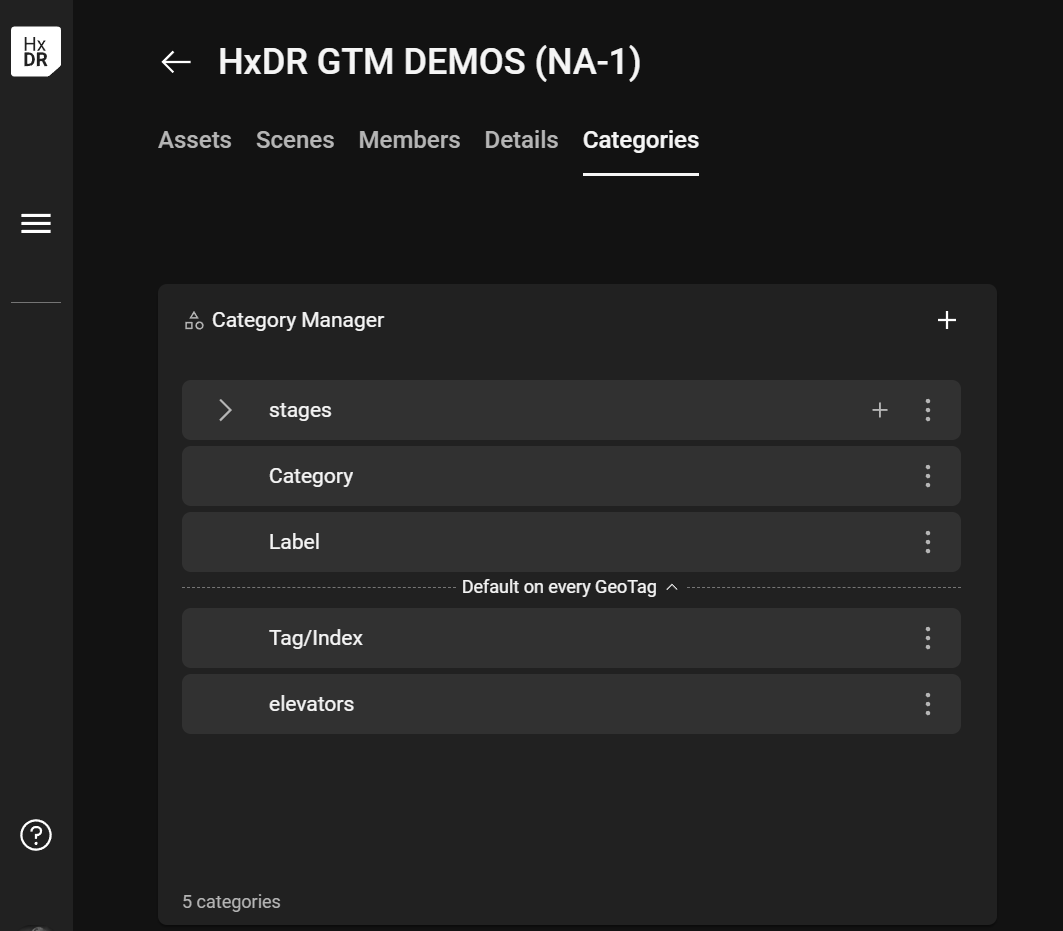
프로젝트의 "카테고리" 페이지로, 카테고리 관리자를 사용하여 무한하고 고유한 카테고리를 정의할 수 있습니다.
카테고리 내용
한 범주는 다음과 같습니다:
이름
가치
범주는 두 가지 유형 중 하나일 수 있으며, 이는 범주의 값을 정의합니다:
텍스트 분류
이 카테고리의 값은 자유 텍스트 필드(즉, 사용자가 입력한 텍스트 문자열)입니다.
사용자가 프로젝트 GeoTag에 텍스트 카테고리를 할당할 때마다, 사용자는 해당 카테고리의 값 필드에 텍스트를 수동으로 입력해야 합니다. 따라서 동일한 텍스트 카테고리를 가진 각 지오태그는 해당 지오태그에 대해 고유한 카테고리 값을 가지게 됩니다(여러 지오태그에서 동일한 텍스트가 입력되더라도).
목록 분류
카테고리의 값은 사용자가 정의된 값 목록에서 선택합니다.
리스트는 무제한 값을 가질 수 있지만, 카테고리가 할당될 때 리스트 내에서 선택될 항목은 하나뿐입니다.
사용자가 목록에 표시되는 순서는 사용자 맞춤 가능합니다.
목록은 정의 카테고리 매니저.
목록 내 각 항목에는 색상이 연관되어 GeoTag에 할당된 카테고리에 대한 빠르고 시각적인 단서를 제공할 수 있습니다.
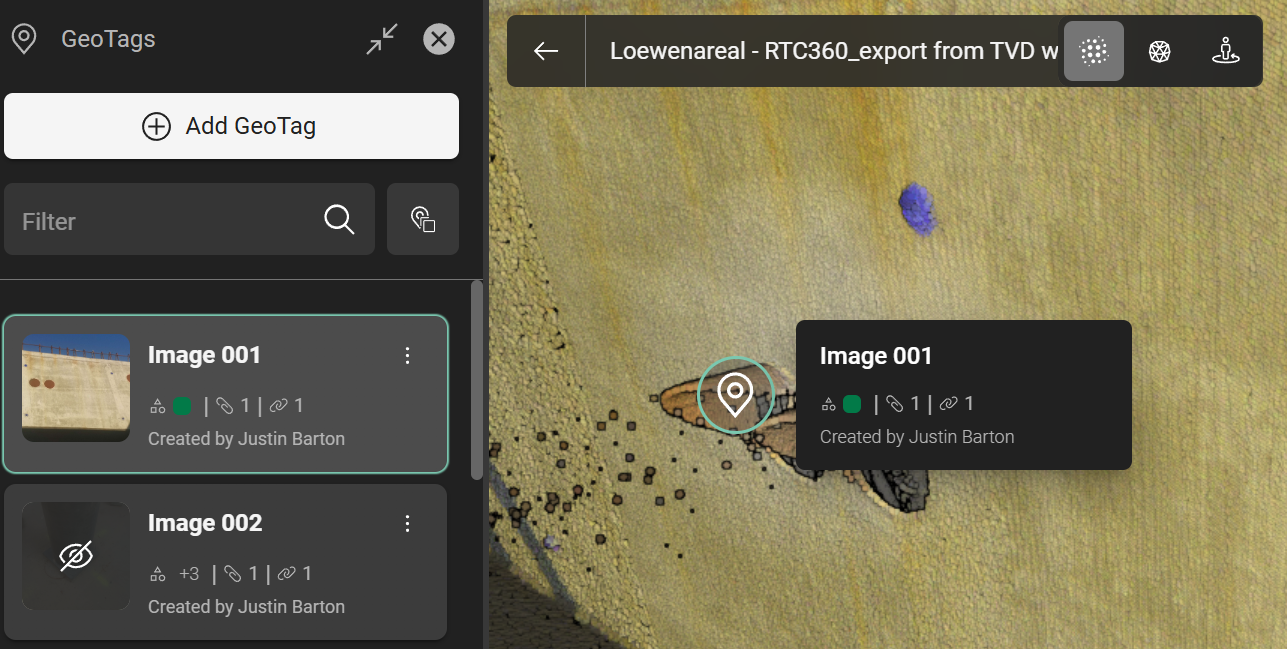
리스트 유형 중 하나의 값이 녹색으로 할당된 범주입니다. 초록색은 3D 캔버스의 호버 타일과 GeoTag 탭의 GeoTag 타일 모두에서 해당 리스트 값을 시각적으로 알려주는 표시로 보입니다.
카테고리 매니저
현재 카테고리는 가져오기 또는 내보내기(예: CSV 파일)가 불가능하며, 프로젝트 간에 복사할 수도 없습니다. 각 프로젝트마다 카테고리를 수동으로 생성해야 합니다.
프로젝트의 카테고리를 관리하려면:
원하는 프로젝트를 열어.
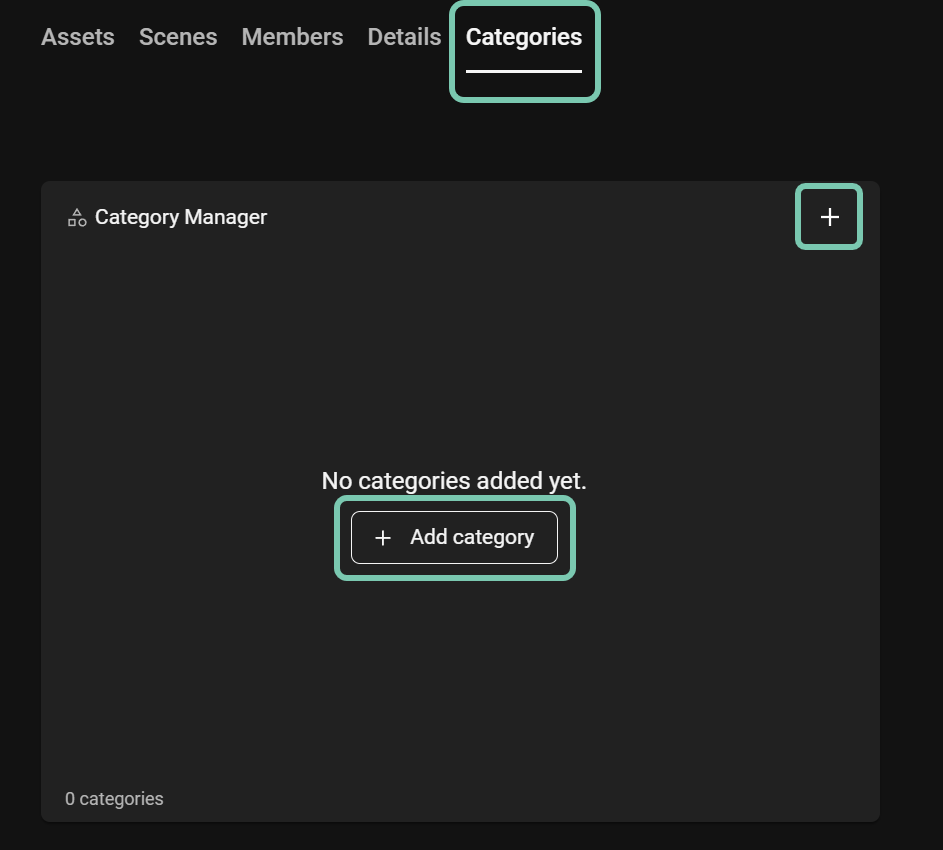
"카테고리"를 클릭하세요 프로젝트의 페이지 목록(즉, 상단에 있는 에셋, 씬, 멤버, 세부 정보 등)에 포함되어 있습니다.
"+ 카테고리 추가"를 클릭하세요 빈 카테고리 매니저 필드 중앙에 위치하여, 또는 "+"를 클릭하세요. 오른쪽 상단에 위치하며(첫 번째 범주가 추가된 후 독립형 "+"가 메서드입니다).
카테고리 유형을 선택하세요
텍스트 범주에 대해
이름을 입력하세요
저장 클릭
리스트 범주에 대해
이름을 입력하세요
저장 클릭
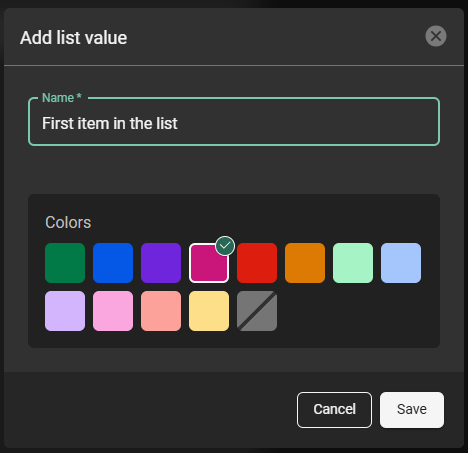
UI가 "List 값 추가" 대화 화면으로 바뀝니다.
리스트 값을 입력할 이름을 입력하세요 추가되는 과정
색깔을 선택하세요 값을 시각적 단서로 표현하기 위해
저장 클릭
각 리스트 값에 이름과 색상을 할당하세요.
3-6단계를 반복하세요 모든 카테고리가 추가될 때까지.
선택사항: 카테고리 및/또는 목록 값의 표시 순서를 재정렬하기:
카테고리 순서 변경: 카테고리 타일을 클릭해 위아래로 드래그하세요 목록에서 다시 정렬할 수 있을까요?
나열된 상위 3개 카테고리(그리고 '모든 지오태그에 기본값' 라인 위에 표시됨)는 새 지오태그를 생성할 때 항상 기본적으로 표시되는 3가지 카테고리로, 가장 흔한 카테고리를 효율적으로 선택할 수 있습니다.
카테고리의 리스트 값 순서 변경:
범주 확장 목록 목록을 보려면 (카테고리 이름 옆에 있는 사이드 포인터 화살표를 클릭하세요)
리스트 값 타일을 클릭하고 위아래로 드래그하세요 목록에서 다시 정렬할 수 있을까요?