プロジェクトの作成とブラウザでのデータのアップロード
1. では、Reality Cloud Studioを使い始めて最初のプロジェクトを作りましょう!
画面左側のハンバーガーメニューをクリックし、その後Reality Cloud Studioをクリックして、プラットフォーム内で直接プロジェクトを作成する旅を始めましょう。
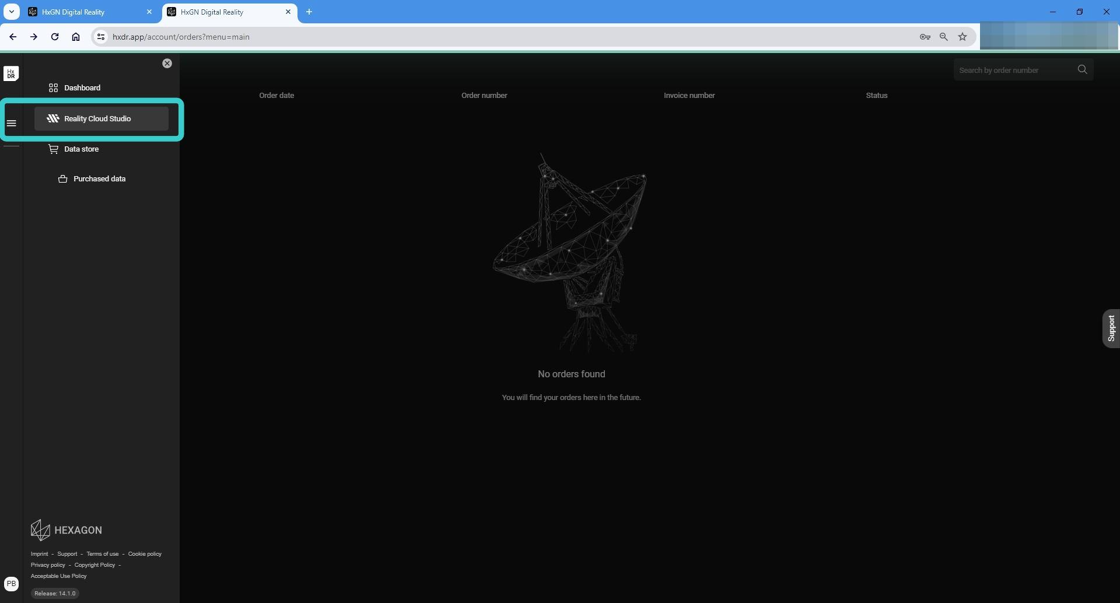
プラットフォームに初めてログインすると、プロジェクトもデータも存在しないことに気づくでしょう。そこで、Reality Cloud Studio内で最初のプロジェクトを作成することで、すぐにそれを解決しましょう。
カチッ プロジェクトを作成
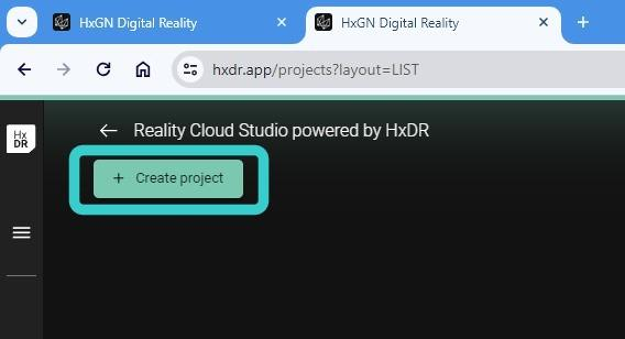
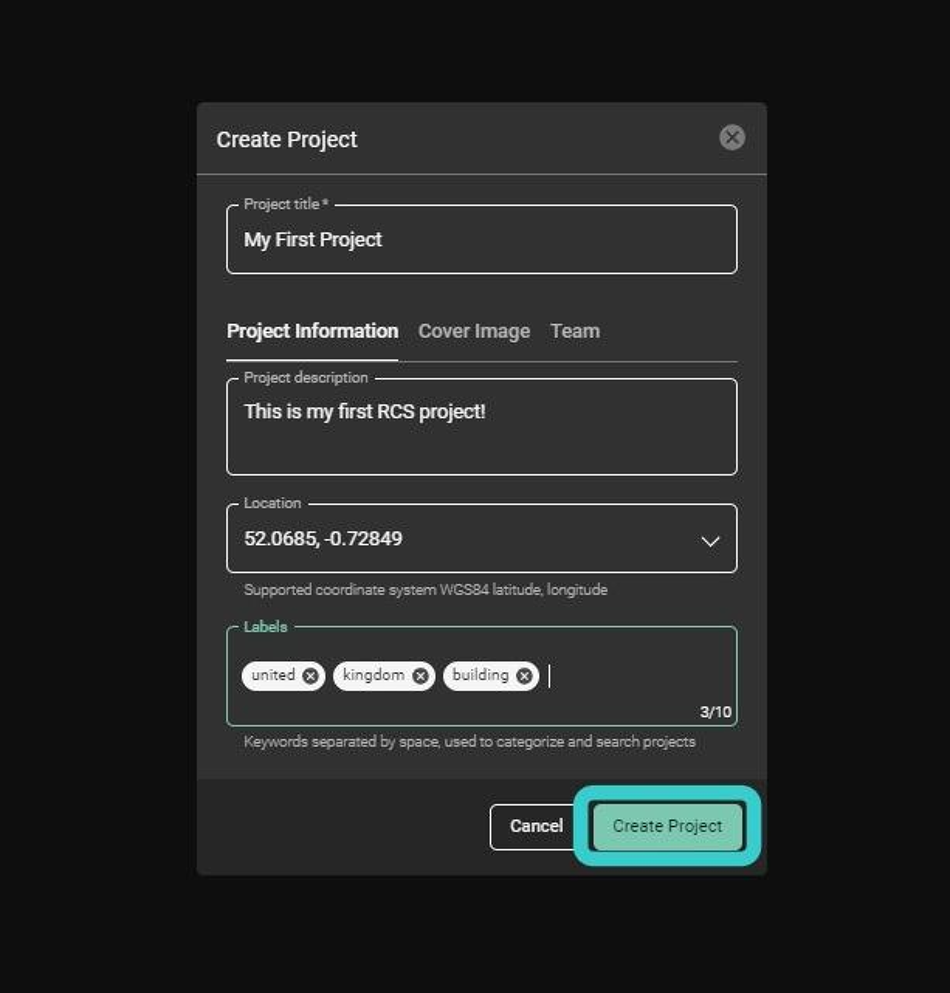
プロジェクト作成をクリックすると、小さなダイアログボックスが表示され、プロジェクト名やプロジェクト説明の作成、プロジェクトの場所追加、Reality Cloud Studio内のさまざまなプロジェクトを追跡できるラベルの追加が可能です。
また、カバー画像を追加することで、プロジェクトリスト内で簡単に認識できるようになります。
この段階では、チームメンバーを追加したり、プロジェクト内で役割を割り当てたりすることもできます。
将来的にいつでもこれらの詳細を編集できます。例えばカバー画像を変更したい場合は、プロジェクト情報を編集することで可能です。

提供したすべての情報に満足したら、クリックしてください プロジェクトを作成 もう一度行うと、次のページに進み、プロジェクトへのデータ追加を始めることができます。
プロジェクトにアクセスするにはクリック
24時間ごとに、データアップロードに関する利用規約を読んだか確認するよう求められます。
続行するには必ず確認をクリックしてください。
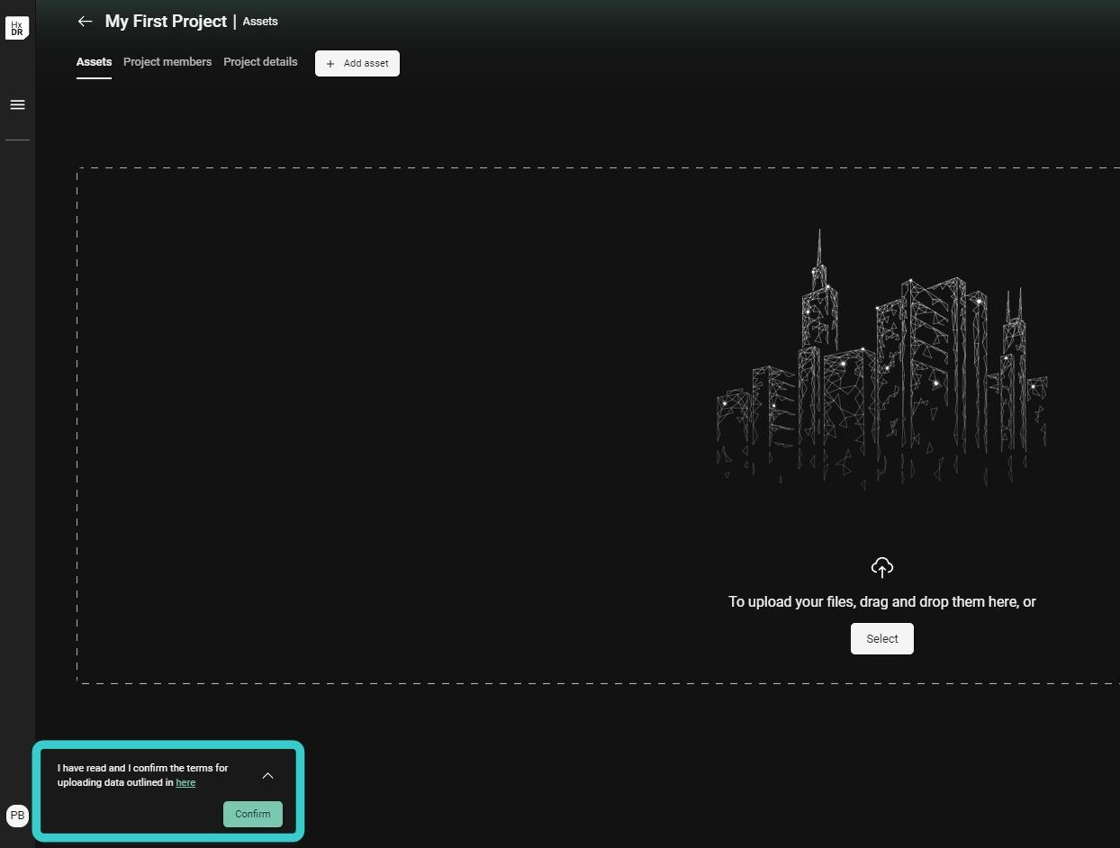
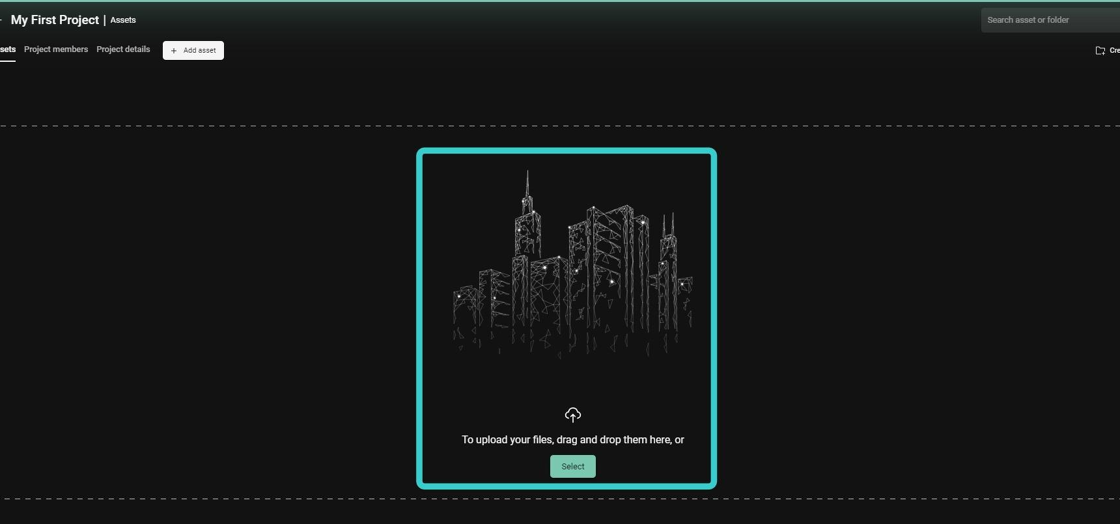
プロジェクトへのデータアップロード
今、アカウントにデータを追加したいと思います。
以下の データフローユーティリティ ファイルをアップロードするには、特に大きなファイルの場合、直接ブラウザにドラッグ&ドロップするよりも信頼性が高く、アップロードが中断されると自動的に再開されます。
Reality Cloud Studioには多種多様なファイル形式をアップロードできます。プラットフォームがサポートしているすべてのファイルのリストはこちらでご覧いただけます Reality Cloud Studio:インポートおよび対応ファイル形式
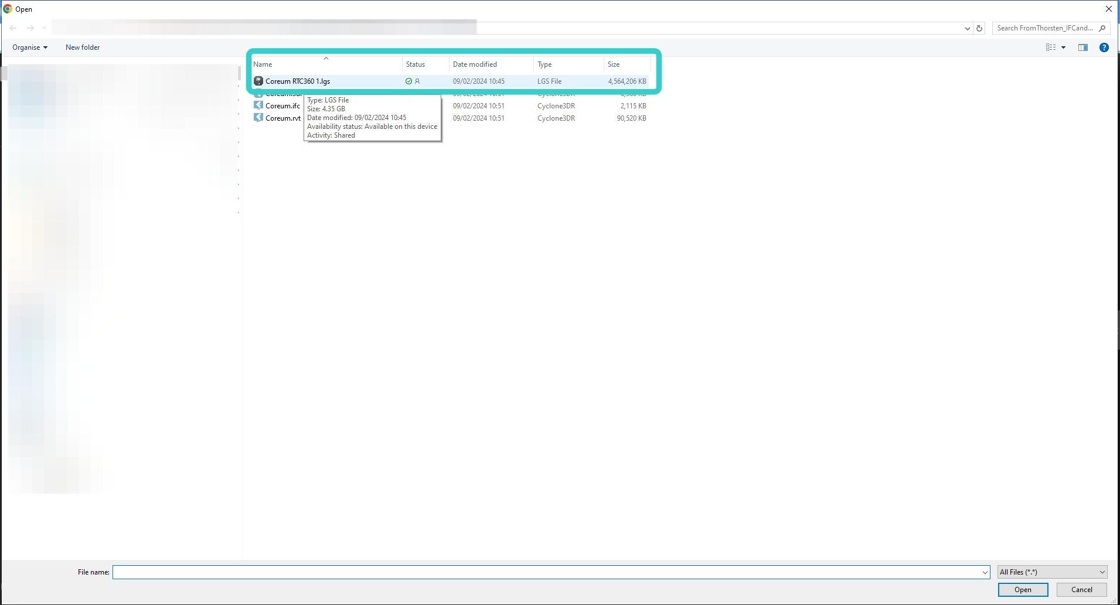
この例では、*をアップロードしています。Leica Cyclone REGISTER 360 PLUSを使って作成されたLGSファイル。
ファイルを選択したらクリック 開けて アップロードプロセスを開始するために
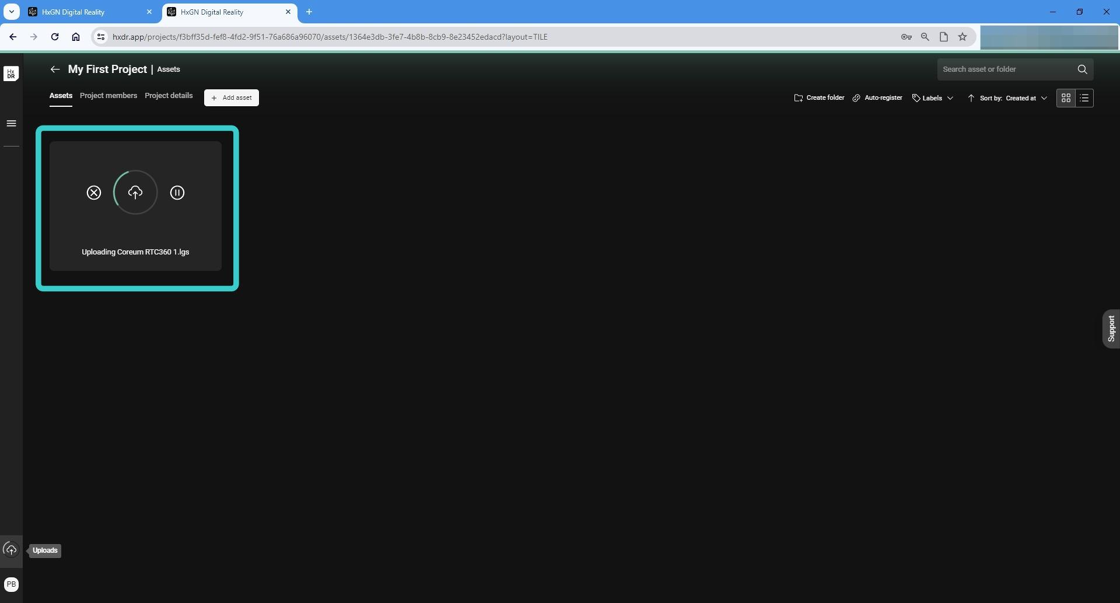
データはすぐにアップロードが始まります。アップロード速度はファイルのサイズとブロードバンド接続の速度の両方に依存します。
アップロードがバックグラウンドで処理されている間も、プラットフォームの利用を続けることができます。
アップロードした資産内でデータとナビゲーションを開くプロセスは、別のトレーニングワークフローとして扱います。