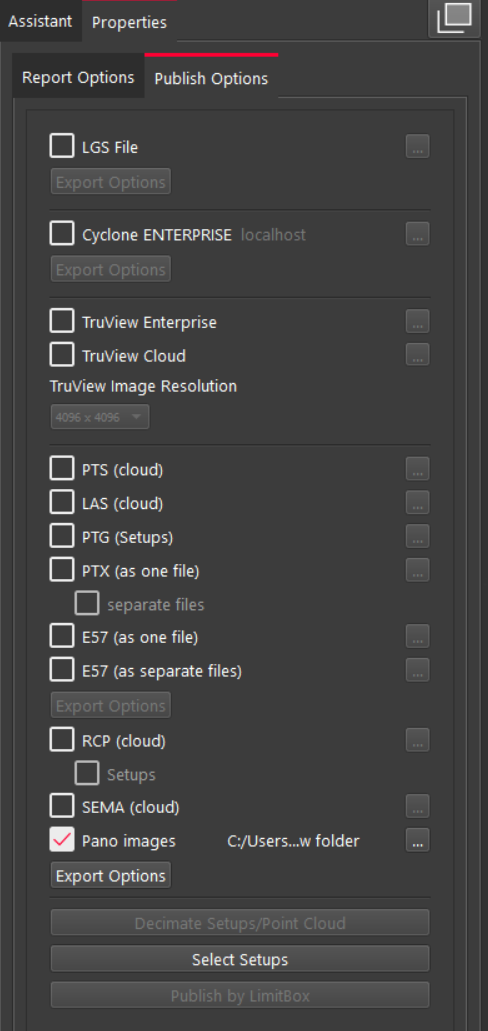
With a Cyclone WORKFLOW license, there is an option to export the HDR, LDR, and IR panoramic images of the Setups (upon the availability of the layers) to JPG, PNG, or both together, along with the Panoramic Image and Setup position and orientation information, using the “Pano images” option from Publish Options in the Report tab of Cyclone REGISTER 360.
-
Select “Pano-images” from Publish Options.
-
Set a folder to export the panoramic image(s).
-
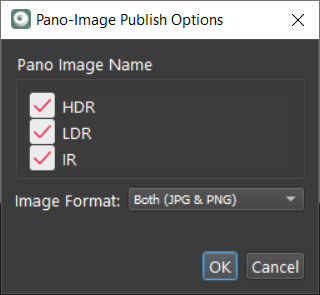
Select the Panoramic image layer HDR, LDR, and IR panoramic images of the Setups (upon the availability of the layers) and the Image Format (JPG, PNG, or both)
When exporting panoramic images, Cyclone REGISTER 360 generates the following files:
-
Images are available in the selected file formats.
-
The CSV file includes the poses of the Setups.
-
The TXT file contains the poses of the Panoramic images.
The panoramic image has a small offset relative to the setup because the camera center doesn’t align exactly with the scanner center, also the panoramic image exhibits a rotation relative to the setup, which is captured in the Pano image pose information.
This information is essential for preserving the position and orientation of the panoramic image in the 3D space. Users should not modify the .txt and .csv files when editing the pano-images
The Panoramic Image and Setup pose include position and orientation information, expressed in quaternion notation. A quaternion is a mathematical expression, represented as q = w + xi + yj + zk, that describes a rotation in 3D space. It consists of four numbers: a scalar part (w) and a vector part (x, y, z). The quaternion units are denoted by i, j, k. For more information on quaternions, please refer to https://en.wikipedia.org/wiki/Quaternion :
-
Position = [x,y,z]: This line indicates the position in the 3D space, where
x,y, andzare the coordinates in meters. -
Orientation: [w,x,y,z]: This line indicates the orientation in the 3D space, where
w,x,y, andzare components of a quaternion.
Example:
With the online tool, https://www.andre-gaschler.com/rotationconverter/, quaternions can be converted into axis-angle format {[x, y, z], angle}, Euler angles or other output formats. For instance, the quaternion of the panoramic image (0.00026144, 0.99988, -0.015489, -0.00029659) corresponds to {[0.99988, -0.015489, -0.0002966], 3.1410698} in the axis-angle format (radians). The quaternion of the Setup (0.99988, -0.00026, 0.00030, -0.01549) is equivalent to {[-0.0167795, 0.019361, -0.9996717], 0.0309914} in the axis-angle format (radians).