(2023.0.1) Cloud-to-Cloud Settings
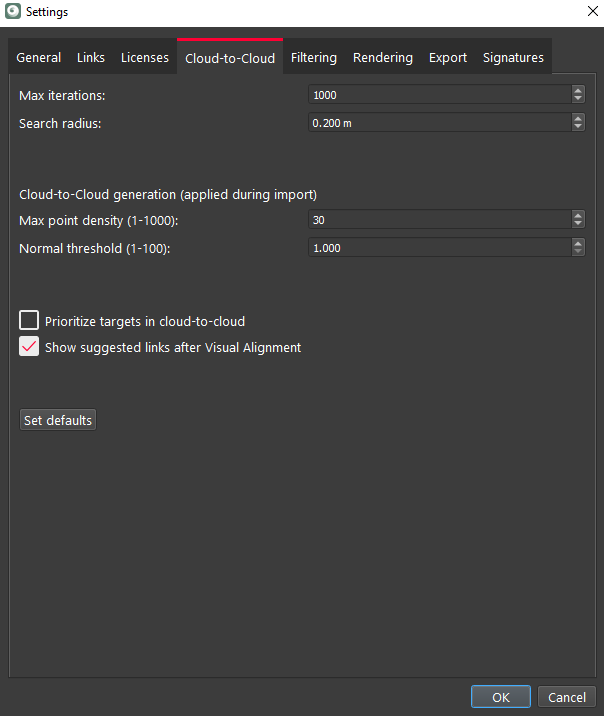
In this tab you can set the values for the Cloud-to-Cloud operation:
Max Iterations
This value controls how many times the program will try to improve the fit of the clouds.
The default value is 100. The upper limit is 9999.
Search Radius
This value controls the radius which the program searches for matches between surfaces.
The default value is 0.200 meters. The upper limit is 5 meters.
Cloud-to-Cloud Generation
These settings affect how the Cloud-to-Cloud cloud is created upon import. Any change to these settings will only affect newly imported Setups.
Max Point Density
Default value is 30. The upper limit is 999.
The higher the number the more points will be included in the cloud used for Cloud-to-Cloud registration.
Normal Threshold
The default value is 1 and the upper limit is 100.
A higher value will filter out more surfaces with irregular faces such as vegetation and those with a sharper angle to the scanner. This noise data is of less value to a Cloud-to-Cloud alignment the more good points will be used in Cloud-to-Cloud registrations.
Using a higher value in areas with a lot of vegetation will result in a lower overlap, using fewer points, but a lower error as well, making it more accurate.
Prioritize Targets in Cloud-to-Cloud
Upon link creation, the system will give much higher weight (like Cyclone CORE) to targets when there is also a cloud-to-cloud constraint. This setting only applies during link creation. This can be helpful in poor Cloud-to-Cloud conditions such as an open field.
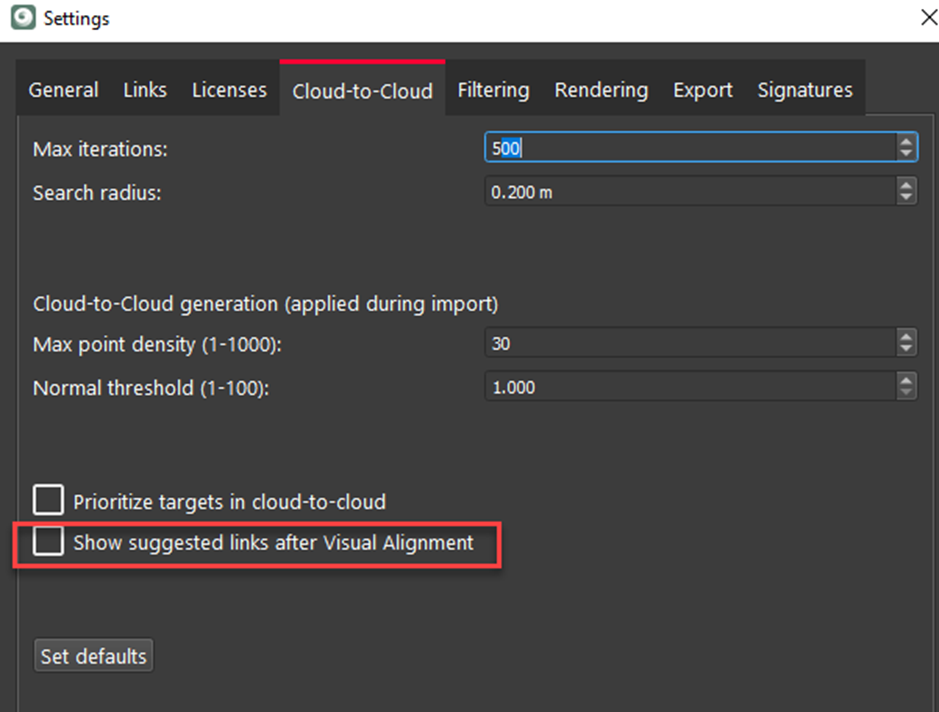
Auto-link Searching for Visual Alignment
By default Cyclone REGISTER 360 PLUS will search for other links when finishing a Visual Alignment. Some users may not want this search to happen to save time, users now have the option of disabling this process.
There is a new option in the Cloud-to-Cloud Settings tab called – Show Suggested links after Visual Alignment. If unchecked, Cyclone REGISTER 360 PLUS will no longer search for additional links after Visual Alignment.